
Not so long ago, I wrote about Revel’s DSL and how it enables programmatic canvas generation. Today I’m excited to share some experiments I’ve been doing with DSL and AI - and how I used a Python script to stress-test the app, which led me down a rabbit hole of performance optimization that culminated in rendering 1 million cubes.
The journey started when I added Bézier curves to Revel and extended the DSL to support them. I wanted to test if AI could actually create something visually appealing using the DSL syntax. So I asked Claude to generate a scenic image.
Surprisingly, it drew a pretty cute scene! A car driving through mountains with a sun, clouds, and even birds flying - all created programmatically using 49 elements.
Generated from ai_drawing.dsl
I understand AI can generate realistic videos in 2025, but I was still genuinely surprised it could compose such a charming scene using primitive shapes and Bézier curves. And this isn’t a static image - you can adjust the scene yourself if needed since everything is built from adjustable DSL elements.
Then I started playing with something more useful for me personally. I took a common interview concept and asked AI to explain it visually using Revel’s DSL. By the way, I’m looking for a full-time software engineering role - if you or your team are solving complex technical challenges, reach out at velo.app1@gmail.com.
I asked it to create a diagram explaining consistent hashing, and it did surprisingly well! The explanation was clear and would probably pass an interview.
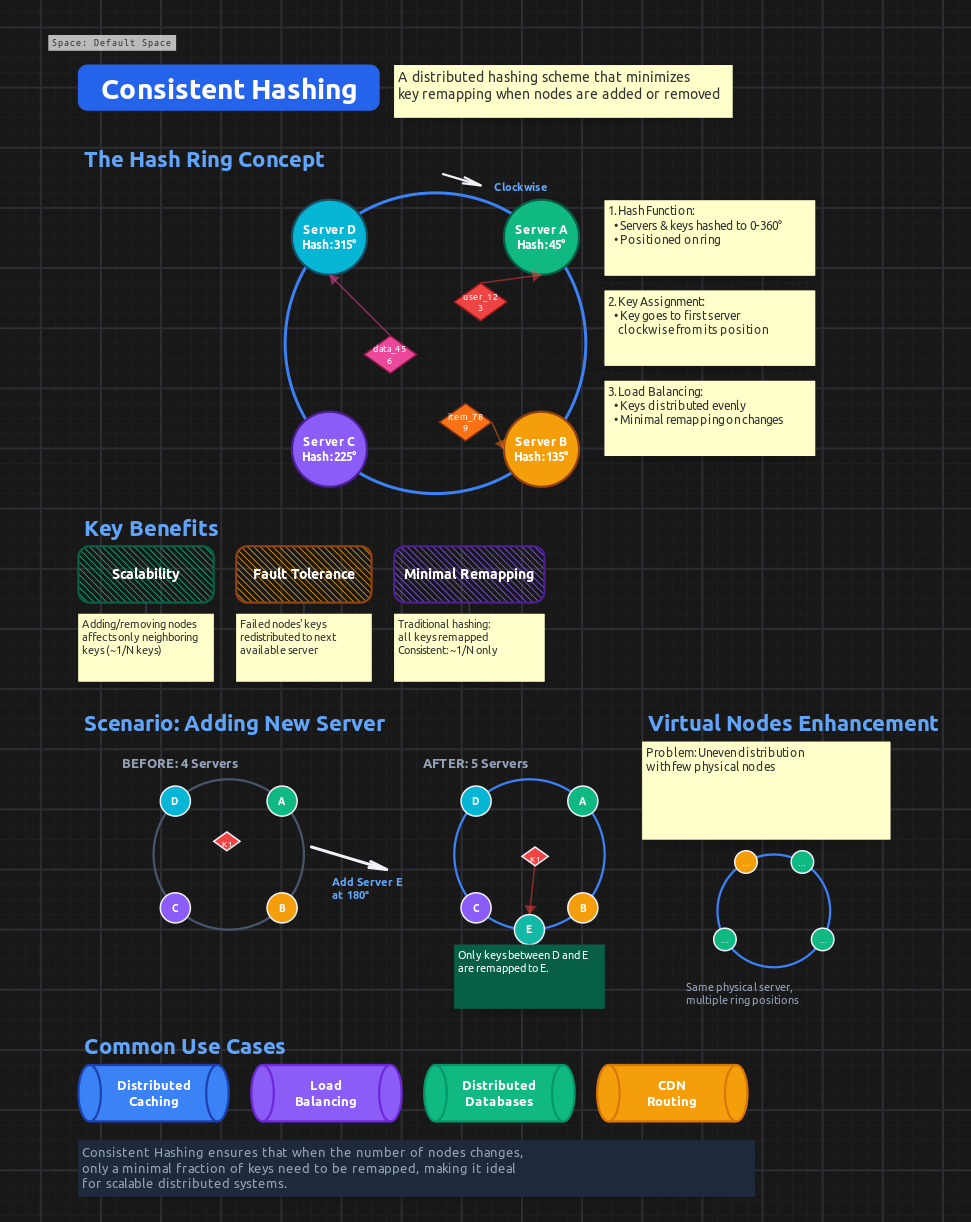
Generated from ai_consistent_hashing.dsl
Again, it’s all adjustable - you can use this as a starting point and add your own touches. And I didn’t even use the most advanced AI model available!
Beyond technical diagrams, the DSL is also great for creating structured layouts like calendars. I asked AI to generate a weekly interview calendar, and it created a clean, professional layout with time slots, color-coded interview blocks, and a status legend.
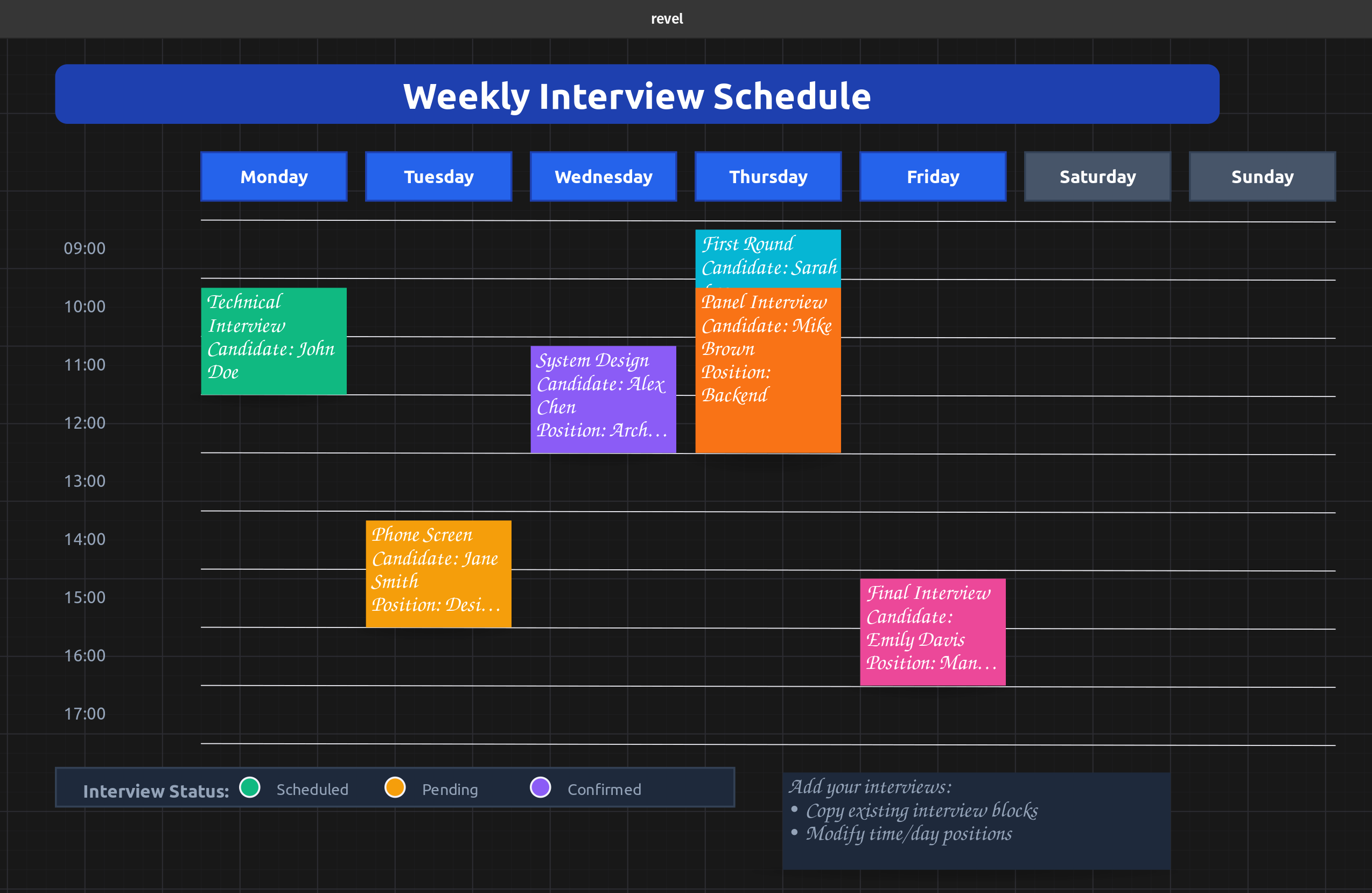
Generated from week_view_dsl.dsl
The calendar includes hourly time slots from 9am-5pm, and you can easily add interview slots by copying the example blocks and adjusting positions. Each interview card can hold candidate details, position info, and be color-coded by status. It’s a practical example of how the DSL can be used for everyday productivity tools, not just technical visualizations.
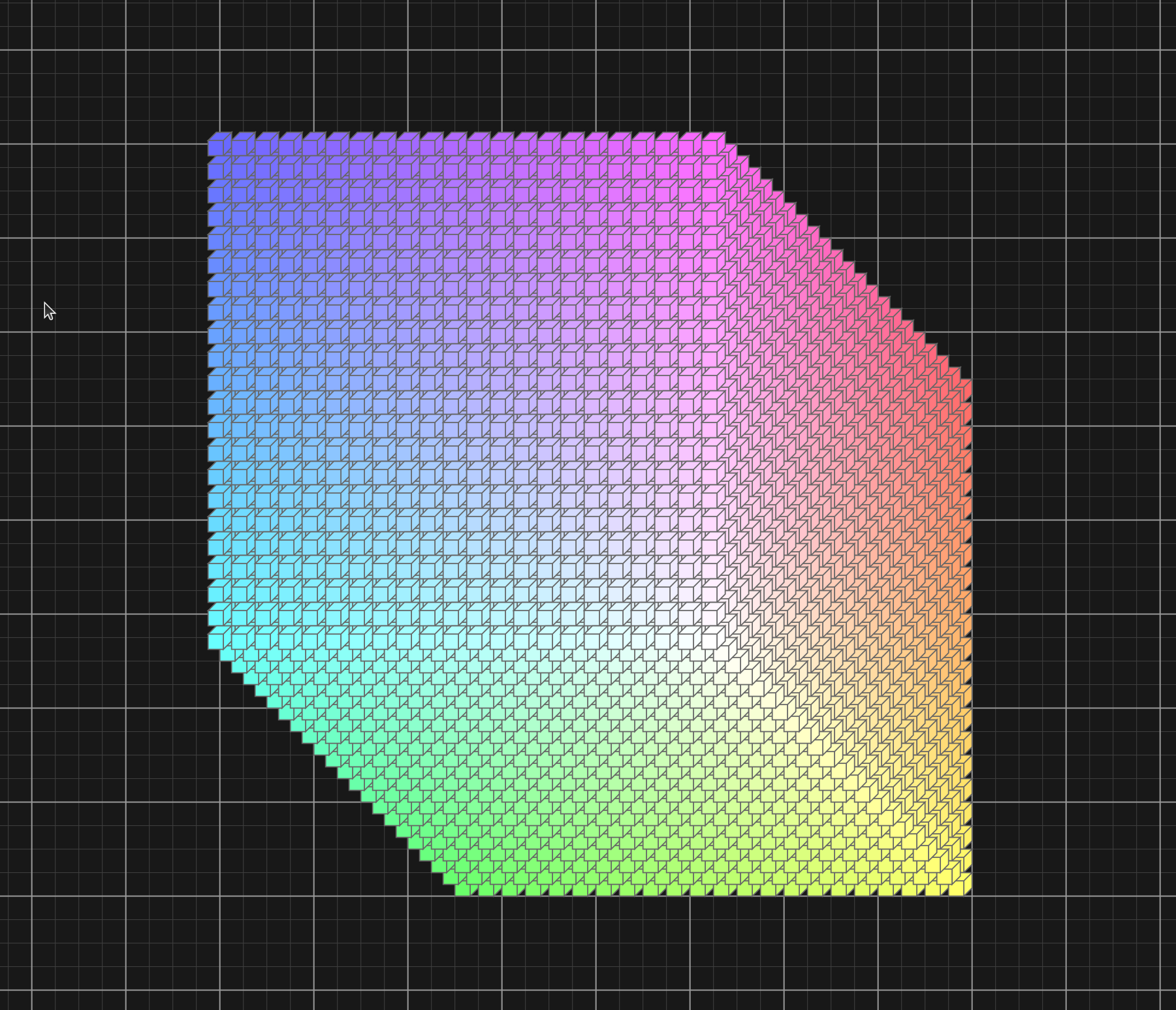
After these experiments, I added support for drawing 3D cubes as a shape type. Then an idea struck me: let’s stress-test the app by drawing a huge 3D structure made of smaller cubes.
That’s how a whole day journey of optimization began.
I wrote a Python script that generates DSL files with different amounts of cubes arranged in a 3D grid:
def generate_dsl(N):
s = 20
offset_x = 1000
offset_y = 1000
for i in range(N):
for j in range(N):
for k in range(N):
x_pos = offset_x + i * s - k * s * 0.5
y_pos = offset_y + j * s - k * s * 0.5
# Gradient coloring based on position
r = int(i / (N-1) * 150) + 105
g = int(j / (N-1) * 150) + 105
b = int(k / (N-1) * 150) + 105
lines.append(f'shape_create cube_{count} cube "" ({int(x_pos)},{int(y_pos)}) ({s},{s}) filled true bg #{r:02x}{g:02x}{b:02x} stroke 1 stroke_color #666666\n')
count += 1The script generates NxNxN cubes with an isometric 3D perspective and gradient coloring.
Initially, I could barely handle 10,000 cubes (a 22×22×22 grid). Anything more would completely freeze the app.
The problem was obvious: I was rendering every single element on every draw call, sorting all elements by z-index, and hitting the database with individual queries for each operation.
The first major optimization was view frustum culling - only rendering elements that are actually visible in the viewport.
In canvas_core.c:475-498, I added:
// Calculate visible area for culling FIRST
int visible_x = -data->offset_x;
int visible_y = -data->offset_y;
int visible_width = gtk_widget_get_width(data->drawing_area) / data->zoom_scale;
int visible_height = gtk_widget_get_height(data->drawing_area) / data->zoom_scale;
// OPTIMIZATION: Collect only visible elements first, then sort
GList *visible_elements = NULL;
for (GList *l = visual_elements; l != NULL; l = l->next) {
Element *element = (Element*)l->data;
// View frustum culling - skip elements completely outside viewport
if (element->x >= visible_x + visible_width ||
element->y >= visible_y + visible_height ||
element->x + element->width <= visible_x ||
element->y + element->height <= visible_y) {
continue;
}
visible_elements = g_list_prepend(visible_elements, element);
}
// Sort only the visible elements by z-index
visible_elements = g_list_sort(visible_elements, compare_elements_by_z_index);This was huge. Instead of sorting and rendering all elements, we now only process what’s actually on screen.
This brought me to 15,000 cubes.
The next bottleneck was element picking - determining which element the user clicked on. With thousands of elements, iterating through all of them on every mouse click was unacceptable.
I implemented a quadtree spatial index (quadtree.c) that partitions the 2D canvas space hierarchically:
static void quadtree_node_insert(QuadTreeNode *node, Element *element) {
if (!bounds_intersects_element(&node->bounds, element)) {
return;
}
if (node->depth >= MAX_DEPTH || node->elements->len < MAX_CAPACITY) {
g_ptr_array_add(node->elements, element);
return;
}
if (node->children[0] == NULL) {
quadtree_node_subdivide(node);
}
// Insert into appropriate child quadrants
for (int i = 0; i < 4; i++) {
quadtree_node_insert(node->children[i], element);
}
}The quadtree includes optimizations for rotated elements using axis-aligned bounding boxes and fast-path checking for non-rotated elements (the common case).
With quadtree picking, element selection went from O(n) to O(log n), making the app responsive even with tens of thousands of elements. Combined with frustum culling, I could now handle 100,000 cubes.
The next bottleneck was SQLite. I was hammering the database with individual inserts for each element when loading DSL files.
I added some SQLite pragmas for better performance (WAL mode, larger cache, memory temp storage), but the biggest win was transaction batching. Originally, I was wrapping each individual element save/load operation in its own transaction. I refactored it to wrap all element saving/loading operations in a single transaction:
database_begin_transaction(canvas->model->db);
// ... create thousands of elements ...
database_commit_transaction(canvas->model->db);This change alone was massive. SQLite’s performance with bulk inserts inside a single transaction is orders of magnitude faster than individual transactions.
I also rewrote several queries to use JOINs instead of separate queries, which reduced round-trips to the database. Another smaller improvement: the space tree view now builds lazily - it only constructs when you actually open it, instead of building on app start.
Combined with these optimizations, database operations went from being the primary bottleneck to barely noticeable.
With all these optimizations in place, I finally reached my goal: 1,000,000 cubes (a 100×100×100 grid).
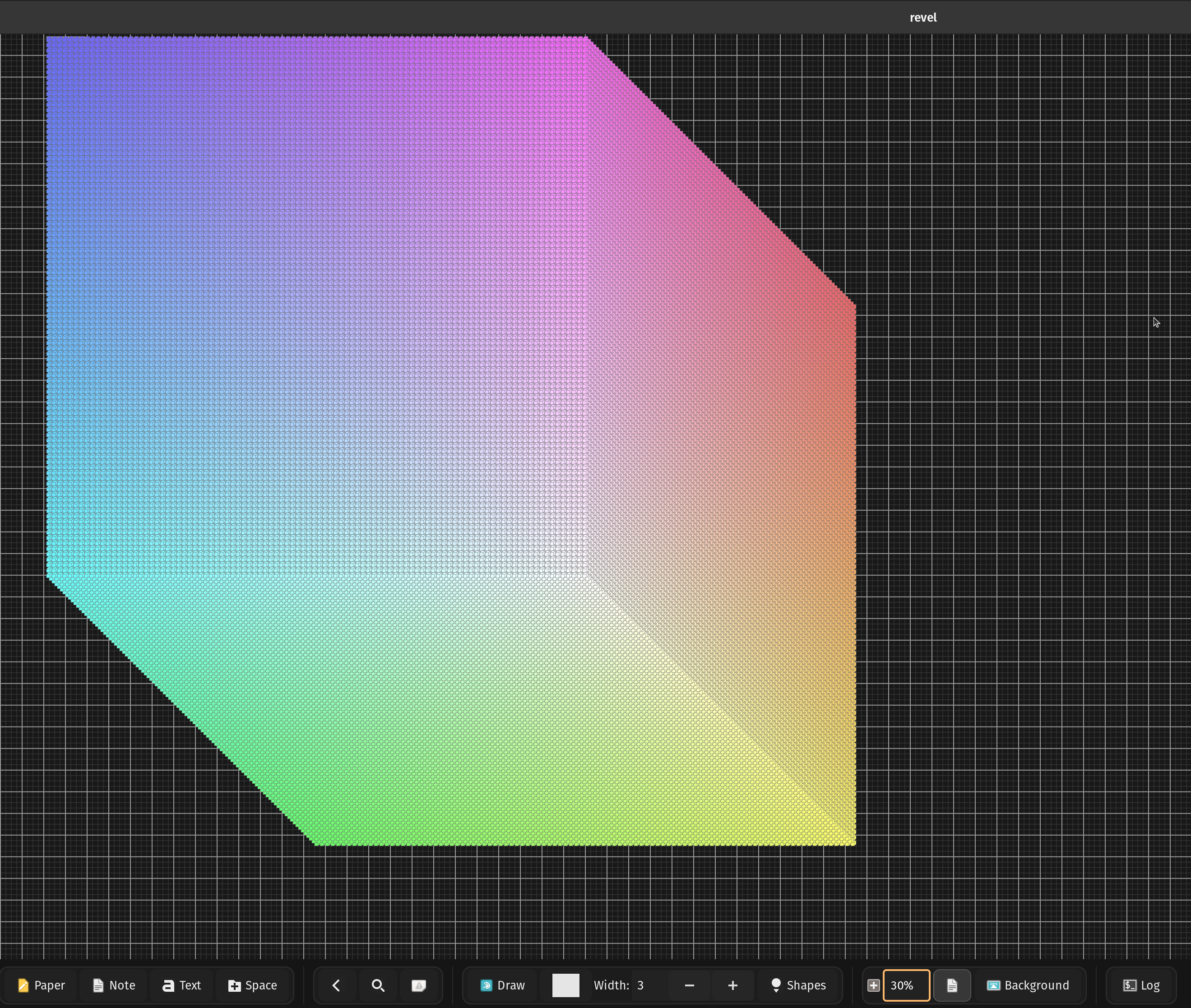
The app can:
I decided to stop here. I will never have anywhere close to 1 million elements in a single space in real-world usage. Mission accomplished.
Revel now handles extreme stress tests that go far beyond real-world usage. The optimizations I implemented for the 1 million cube challenge benefit everyday use:
I’m still actively using Revel daily for project planning, technical diagrams, and interview preparation. The combination of DSL automation and AI generation opens up interesting possibilities. Imagine asking an AI to “draw the system design of Netflix-like distributed system” and having it generate a fully-interactive, editable architecture diagram with all the components, connections, and explanations.
If you want to try the stress test yourself:
# Generate 100x100x100 cube DSL (1 million cubes)
python examples/cube_generator.py 100
# Load it into Revel
./revel --dsl examples/ai_cube.dslWarning: This will take some time to load and use several GB of RAM. Start with smaller values like 20 (8,000 cubes) to get a feel for it.
Building this in C continues to be a joy. No dependency hell, no framework magic, no compilation slowdowns. Just straightforward systems programming with direct control over performance.
Links: